Note
Go to the end to download the full example code.
Digital Linear Filters#
Graphical explanation of the differences between standard DLF, lagged convolution DLF, and splined DLF.
The comments here apply generally to the digital linear filter method. Having
empymod in mind, they are particularly meant for the Hankel
(Bessel-Fourier) transform from the wavenumber-frequency domain (\(k-f\))
to the space-frequency domain (\(x-f\)), and for the Fourier transform from
the space-frequency domain (\(x-f\)) to the space-time domain
(\(x-t\)).
1. Introduction#
This introduction is taken from Werthmüller et al. (2018), which can be found in the repo empymod/article-fdesign.
In electromagnetics we often have to evaluate integrals of the form
where \(l\) and \(r\) denote input and output evaluation values, respectively, and \(K\) is the kernel function. In the specific case of the Hankel transform \(l\) corresponds to wavenumber, \(r\) to offset, and \(K\) to Bessel functions; in the case of the Fourier transform \(l\) corresponds to frequency, \(r\) to time, and \(K\) to sine or cosine functions. In both cases it is an infinite integral which numerical integration is very time-consuming because of the slow decay of the kernel function and its oscillatory behaviour.
By substituting \(r = e^x\) and \(l = e^{-y}\) we get
This can be re-written as a convolution integral and be approximated for an \(N\)-point filter by
where \(h\) is the digital linear filter, and the logarithmically spaced filter abscissae is a function of the spacing \(\Delta\) and the shift \(\delta\),
From the penultimate equation it can be seen that the filter method requires \(N\) evaluations at each \(r\). For example, to compute the frequency domain result for 100 offsets with a 201 pt filter requires 20,100 evaluations in the wavenumber domain. This is why the DLF often uses interpolation to minimize the required evaluations, either for \(F(r)\) in what is referred to as lagged convolution DLF, or for \(f(l)\), which we call here splined DLF.
import empymod
import numpy as np
import matplotlib.pyplot as plt
plt.style.use('ggplot')
2. How the DLF works#
Design a very short, digital linear filter#
For this we use empymod.fdesign. This is outside the scope of this
notebook. If you are interested have a look at the article-fdesign-repo for more information
regarding the design of digital linear filters.
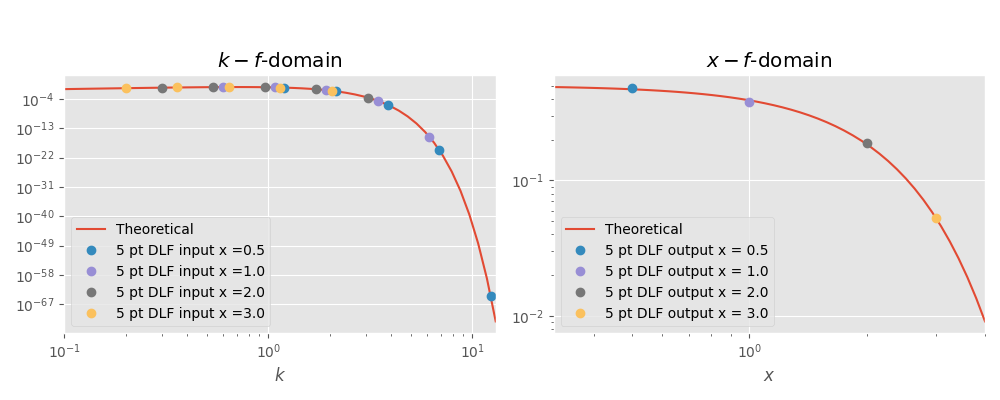
We design a 5pt filter using the theoretical transform pair
A 5 pt filter is very short for this problem, so we expect a considerable error level. In designing the filter we force the filter to be better than a relative error of 5 %.
If you want to play around with this example I recommend to set verb=2
and plot=2 to get some feedback from the minimization procedure.
filt = empymod.fdesign.design(
n=5, # 5 point filter
spacing=(0.55, 0.65, 101),
shift=(0.6, 0.7, 101),
fI=empymod.fdesign.j0_1(),
r=np.logspace(0, 1, 100),
r_def=(1, 1, 10),
error=0.05, # 5 % error level. If you set this too low you will
verb=1, # # not find a filter with only 5 points.
plot=0,
)
print('Filter base ::', filt.base)
print('Filter weights ::', filt.j0)
Filter base :: [0.59929579 1.07250818 1.91937574 3.43494186 6.14722033]
Filter weights :: [ 0.84042401 -0.00226984 0.57950981 -0.82310148 0.22837621]
Now we carry out the DLF and check how good it is.
# Desired x-f-domain points (output domain)
x = np.array([0.5, 1, 2, 3])
# Required k-f-domain points (input domain)
k = filt.base/x[:, None]
# Get the theoretical transform pair
tp = empymod.fdesign.j0_1()
# Compute the value at the five required wavenumbers
k_val = tp.lhs(k)
# Weight the values and sum them up
x_val_filt = np.dot(k_val, filt.j0)/x
# Compute the theoretical value for comparison
x_val_theo = tp.rhs(x)
# Compute relative error
print('A DLF for this problem with only a 5 pt filter is difficult. We used')
print('an error-limit of 0.05 in the filter design, so we expect the result')
print('to have a relative error of less than 5 %.\n')
print('Theoretical value ::', '; '.join([f'{i:G}' for i in x_val_theo]))
print('DLF value ::', '; '.join([f'{i:G}' for i in x_val_filt]))
relerror = np.abs((x_val_theo-x_val_filt)/x_val_theo)
print('Rel. error 5 pt DLF ::', ' % ; '.join(
[f'{i:G}' for i in np.round(relerror*100, 1)]), '%')
# Figure
plt.figure(figsize=(10, 4), constrained_layout=True)
plt.suptitle(r'DLF example for $J_0$ Hankel transform using 5 pt filter',
y=1.05)
# x-axis values for the theoretical plots
x_k = np.logspace(-1, np.log10(13))
x_x = np.logspace(-0.5, np.log10(4))
# k-f-domain
plt.subplot(121)
plt.title(r'$k-f$-domain')
plt.loglog(x_k, tp.lhs(x_k), label='Theoretical')
for i, val in enumerate(x):
plt.loglog(k[i, :], k_val[i, ], 'o', label='5 pt DLF input x ='+str(val))
plt.legend()
plt.xlabel(r'$k$')
plt.xlim([x_k.min(), x_k.max()])
# x-f-domain
plt.subplot(122)
plt.title(r'$x-f$-domain')
plt.loglog(x_x, tp.rhs(x_x), label='Theoretical')
for i, val in enumerate(x):
plt.loglog(val, x_val_filt[i], 'o', label='5 pt DLF output x = '+str(val))
plt.legend()
plt.xlabel(r'$x$')
plt.xlim([x_x.min(), x_x.max()])
A DLF for this problem with only a 5 pt filter is difficult. We used
an error-limit of 0.05 in the filter design, so we expect the result
to have a relative error of less than 5 %.
Theoretical value :: 0.469707; 0.3894; 0.18394; 0.0526996
DLF value :: 0.478846; 0.378842; 0.188375; 0.053272
Rel. error 5 pt DLF :: 1.9 % ; 2.7 % ; 2.4 % ; 1.1 %
3. Difference between standard, lagged convolution, and splined DLF#
Filter weights and the actual DLF are ignored in the explanation, we only look at the required data points in the input domain given our desired points in the output domain.
General parameters
3.1 Standard DLF#
For each point in the output domain you have to compute \(n\) points in the input domain, where \(n\) is the filter length.
Implementation in ``empymod``
This is the most precise one, as no interpolation is used, but generally the slowest one. It is the default method for the Hankel transform.
For the Hankel transform, use these parameters in empymod.dipole or
empymod.bipole (from version v1.6.0 onwards):
For the Fourier transform, use these parameters in empymod.dipole or
empymod.bipole (from version v1.6.0 onwards):
# Required points in the input domain (k-f or x-f domain)
d_in = base/d_out[:, None]
# Print information
print('Points in output domain ::', d_out.size)
print('Filter length ::', base.size)
print('Req. pts in input domain ::', d_in.size)
# Figure
plt.figure()
plt.title('Standard DLF')
plt.hlines(1, 1e-5, 1e5)
plt.hlines(0, 1e-5, 1e5)
# Print scheme
for i, val in enumerate(d_out):
for ii, ival in enumerate(d_in[i, :]):
plt.plot(ival, 0, 'C'+str(i)+'x')
plt.plot([ival, val], [0, 1], 'C'+str(i))
plt.plot(val, 1, 'C'+str(i)+'o')
plt.xscale('log')
plt.xlim([5e-5, 5e3])
# Annotations
plt.text(2e3, 0.5, '--- DLF --->', rotation=90, va='center')
plt.text(1e-4, 0.5, '--- DLF --->', rotation=90, va='center')
plt.yticks([0, 1], (r'$k-f$', r'$x-f$'))
plt.ylabel('Hankel transform')
plt.ylim([-0.1, 1.1])
plt.gca().twinx()
plt.yticks([0, 1], (r'$x-f$', r'$x-t$'))
plt.ylabel('Fourier transform')
plt.ylim([-0.1, 1.1])
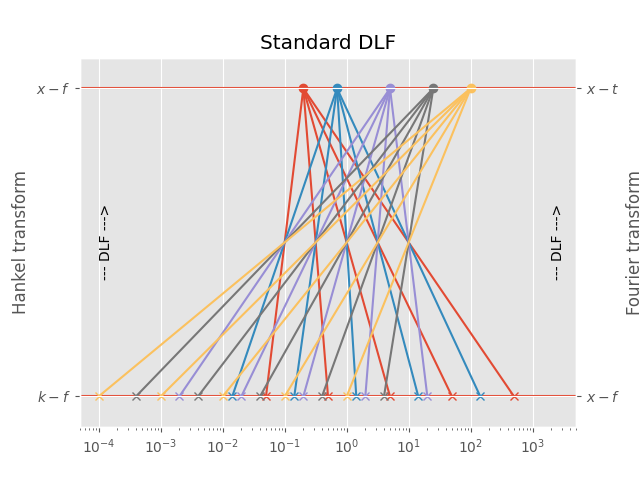
Points in output domain :: 5
Filter length :: 5
Req. pts in input domain :: 25
3.2 Lagged Convolution DLF#
The spacing of the filter base is used to get from minimum to maximum required input-domain point (\(k\) in the case of the Hankel transform, \(f\) in the case of the Fourier transform); for each complete set the DLF is executed to compute the output-domain response (\(f\) in the case of the Hankel transform, \(t\) in the case of the Fourier transform), and interpolation is carried out in the output-domain.
Implementation in ``empymod``
This is usually the fastest option, and generally still more than sufficiently precise. It is the default method for the Fourier transform.
For the Hankel transform, use these parameters in empymod.dipole or
empymod.bipole (from version v1.6.0 onwards):
For the Fourier transform, use these parameters in empymod.dipole or
empymod.bipole (from version v1.6.0 onwards):
# Required points in the k-domain
d_in2 = np.array([1e-4, 1e-3, 1e-2, 1e-1, 1e0, 1e1, 1e2, 1e3])
# Intermediat values in the f-domain
d_out2 = np.array([1e-1, 1e0, 1e1, 1e2])
# Print information
print('Points in output-domain ::', d_out.size)
print('Filter length ::', base.size)
print('Req. pts in input-domain ::', d_in2.size)
# Figure
plt.figure()
plt.title('Lagged convolution DLF')
plt.hlines(1, 1e-5, 1e5)
plt.hlines(0, 1e-5, 1e5)
plt.hlines(0.5, 1e-5, 1e5)
# Plot scheme
for i, val in enumerate(d_out2):
for ii in range(base.size):
plt.plot([d_in2[-1-ii-i], val], [0, 0.5], str(0.7-0.2*i))
for iii, val2 in enumerate(d_out):
plt.plot(val2, 1, 'C'+str(iii)+'o')
plt.plot([val2, val2], [0.5, 1], 'C'+str(iii))
plt.plot(d_in2, d_in2*0, 'ko', ms=8)
plt.plot(d_out2, d_out2*0+0.5, 'ks', ms=8)
plt.xscale('log')
plt.xlim([5e-5, 5e3])
# Annotations
plt.text(2e3, 0.75, '- Interpolation ->', rotation=90, va='center')
plt.text(2e3, 0.25, '--- DLF --->', rotation=90, va='center')
plt.text(1e-4, 0.75, '- Interpolation ->', rotation=90, va='center')
plt.text(1e-4, 0.25, '--- DLF --->', rotation=90, va='center')
plt.yticks([0, 0.5, 1], (r'$k-f$', r'$x-f$', r'$x-f$'))
plt.ylabel('Hankel transform')
plt.ylim([-0.1, 1.1])
plt.gca().twinx()
plt.yticks([0, 0.5, 1], (r'$x-f$', r'$x-t$', r'$x-t$'))
plt.ylabel('Fourier transform')
plt.ylim([-0.1, 1.1])
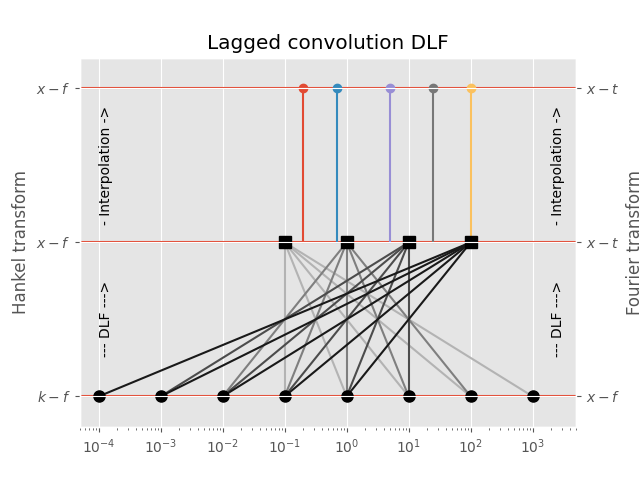
Points in output-domain :: 5
Filter length :: 5
Req. pts in input-domain :: 8
3.3 Splined DLF#
In the splined DLF \(m\) points per decade are used from minimum to maximum required input-domain point (\(k\) in the case of the Hankel transform, \(f\) in the case of the Fourier transform); then the required input-domain responses are interpolated in the input domain, and the DLF is exececuted subsequently.
Implementation in ``empymod``
This option can, at times, yield more precise results than the lagged
convolution DLF, while being slower than the lagged convolution DLF but
faster than the standard DLF. However, you have to carefully choose (or
better, test) the parameter pts_per_dec.
For the Hankel transform, use these parameters in empymod.dipole or
empymod.bipole (from version v1.6.0 onwards):
For the Fourier transform, use these parameters in empymod.dipole or
empymod.bipole (from version v1.6.0 onwards):
# Required points in the k-domain
d_in_min = np.log10(d_in).min()
d_in_max = np.ceil(np.log10(d_in).max())
pts_per_dec = 3
d_in2 = np.logspace(d_in_min, d_in_max, int((d_in_max-d_in_min)*pts_per_dec+1))
# Print information
print('Points in input-domain ::', d_out.size)
print('Filter length ::', base.size)
print('Points per decade ::', pts_per_dec)
print('Req. pts in output-domain ::', d_in2.size)
# Figure
plt.figure()
plt.title('Splined DLF')
plt.hlines(1, 1e-5, 1e5)
plt.hlines(0.5, 1e-5, 1e5)
plt.hlines(0, 1e-5, 1e5)
# Plot scheme
for i, val in enumerate(d_out):
for ii, ival in enumerate(d_in[i, :]):
plt.plot(ival, 0.5, 'C'+str(i)+'x')
plt.plot([ival, ival], [0, 0.5], str(0.6-0.1*i))
plt.plot([ival, val], [0.5, 1], 'C'+str(i))
plt.plot(val, 1, 'C'+str(i)+'o')
plt.plot(d_in2, d_in2*0, 'ks')
plt.xscale('log')
plt.xlim([5e-5, 5e3])
# Annotations
plt.text(2e3, 0.25, '- Interpolation ->', rotation=90, va='center')
plt.text(2e3, 0.75, '--- DLF --->', rotation=90, va='center')
plt.text(1.5e-4, 0.25, '- Interpolation ->', rotation=90, va='center')
plt.text(1.5e-4, 0.75, '--- DLF --->', rotation=90, va='center')
plt.yticks([0, 0.5, 1], (r'$k-f$', r'$k-f$', r'$x-f$'))
plt.ylabel('Hankel transform')
plt.ylim([-0.1, 1.1])
plt.gca().twinx()
plt.yticks([0, 0.5, 1], (r'$x-f$', r'$x-f$', r'$x-t$'))
plt.ylabel('Fourier transform')
plt.ylim([-0.1, 1.1])
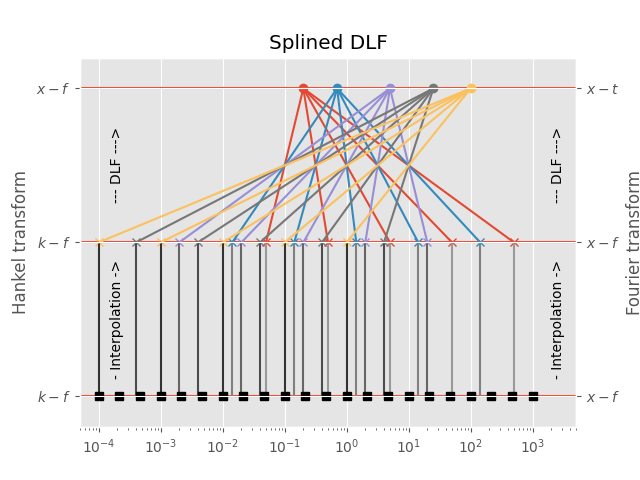
Points in input-domain :: 5
Filter length :: 5
Points per decade :: 3
Req. pts in output-domain :: 22
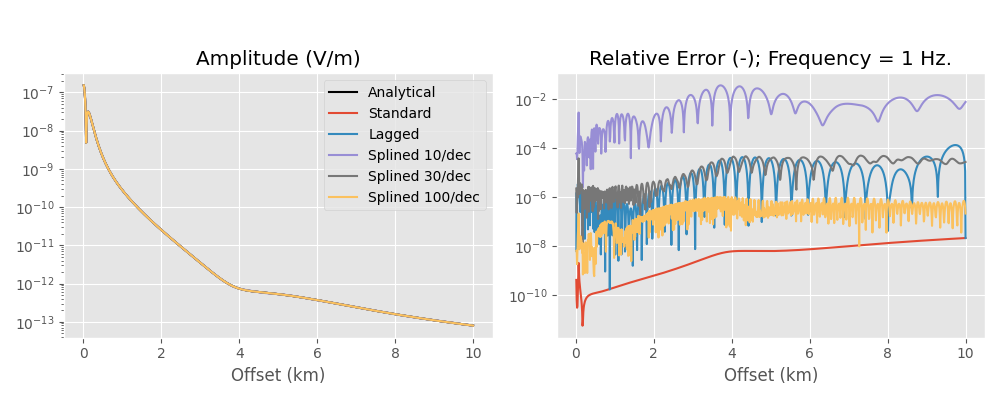
4. Example for the Hankel transform#
The following is an example for the Hankel transform. Be aware that the actual differences in time and accuracy depend highly on the model. If time or accuracy is a critical issue in your computation I suggest to run some preliminary tests. It also depends heavily if you have many offsets, or many frequencies, or many layers, as one method might be better for many frequencies but few offsets, but the other method might be better for many offsets but few frequencies.
As general rules we can state that
the longer the used filter is, or
the more offsets you have
the higher is the time gain you get by using the lagged convolution or splined version of the DLF.
Here we compare the analytical halfspace solution to the numerical result, using the standard DLF, the lagged convolution DLF, and the splined DLF. Note the oscillating behaviour of the error of the lagged convolution and the splined versions, which comes from the interpolation and is not present in the standard version.
Define model, compute analytical solution
x = (np.arange(1, 1001))*10
params = {
'src': [0, 0, 150],
'rec': [x, x*0, 200],
'depth': 0,
'res': [2e14, 1],
'freqtime': 1,
'ab': 11,
'aniso': [1, 2],
'xdirect': False,
'verb': 0,
}
# Used Hankel filter
hfilt = empymod.filters.Hankel().key_201_2009
# Compute analytical solution
resp = empymod.analytical(
params['src'], params['rec'], params['res'][1], params['freqtime'],
solution='dhs', aniso=params['aniso'][1], ab=params['ab'],
verb=params['verb']
)
Compute numerically the model using different Hankel options#
standard = empymod.dipole(**params, htarg={'dlf': hfilt, 'pts_per_dec': 0})
laggedco = empymod.dipole(**params, htarg={'dlf': hfilt, 'pts_per_dec': -1})
spline10 = empymod.dipole(**params, htarg={'dlf': hfilt, 'pts_per_dec': 10})
spline30 = empymod.dipole(**params, htarg={'dlf': hfilt, 'pts_per_dec': 30})
splin100 = empymod.dipole(**params, htarg={'dlf': hfilt, 'pts_per_dec': 100})
Results#
plt.figure(figsize=(10, 4))
plt.suptitle('Hankel transform example; frequency = ' +
str(params['freqtime'])+' Hz', y=1.05, fontsize=15)
plt.subplot(121)
plt.title('Amplitude (V/m)')
plt.semilogy(x/1000, np.abs(resp), 'k', label='Analytical')
plt.semilogy(x/1000, np.abs(standard), label='Standard')
plt.semilogy(x/1000, np.abs(laggedco), label='Lagged')
plt.semilogy(x/1000, np.abs(spline10), label='Splined 10/dec')
plt.semilogy(x/1000, np.abs(spline30), label='Splined 30/dec')
plt.semilogy(x/1000, np.abs(splin100), label='Splined 100/dec')
plt.xlabel('Offset (km)')
plt.legend()
plt.subplot(122)
plt.title('Relative Error (-); Frequency = '+str(params['freqtime'])+' Hz.')
plt.semilogy(x/1000, np.abs((standard-resp)/resp), label='Standard')
plt.semilogy(x/1000, np.abs((laggedco-resp)/resp), label='Lagged')
plt.semilogy(x/1000, np.abs((spline10-resp)/resp), label='Splined 10/dec')
plt.semilogy(x/1000, np.abs((spline30-resp)/resp), label='Splined 30/dec')
plt.semilogy(x/1000, np.abs((splin100-resp)/resp), label='Splined 100/dec')
plt.xlabel('Offset (km)')
Runtimes and number of required wavenumbers for each method:
Hankel DLF Method |
Time (ms) |
# of wavenumbers |
|---|---|---|
Standard |
169 |
201000 |
Lagged Convolution |
4 |
295 |
Splined 10/dec |
95 |
96 |
Splined 30/dec |
98 |
284 |
Splined 100/dec |
111 |
944 |
So the lagged convolution has a relative error between roughly 1e-6 to 1e-4, hence 0.0001 % to 0.01 %, which is more then enough for real-world applications.
If you want to measure the runtime on your machine set params['verb'] =
2.
Note: If you use the splined version with about 500 samples per decade you get about the same accuracy as in the standard version. However, you get also about the same runtime.
5. Example for the Fourier transform#
The same now for the Fourier transform. Obviously, when we use the Fourier transform we also use the Hankel transform. However, in this example we use only one offset. If there is only one offset then the lagged convolution or splined DLF for the Hankel transform do not make sense, and the standard is the fastest. So we use the standard Hankel DLF here. If you have many offsets then that would be different.
As general rules we can state that
the longer the used filter is, or
the more times you have
the higher is the time gain you get by using the lagged convolution or splined version of the DLF.
Define model, compute analytical solution#
t = np.logspace(0, 2, 100)
xt = 2000
tparam = params.copy()
tparam['rec'] = [xt, 0, 200]
tparam['freqtime'] = t
tparam['signal'] = 0 # Impulse response
# Used Fourier filter
ffilt = empymod.filters.Fourier().key_81_2009
# Compute analytical solution
tresp = empymod.analytical(
tparam['src'], tparam['rec'], tparam['res'][1], tparam['freqtime'],
signal=tparam['signal'], solution='dhs', aniso=tparam['aniso'][1],
ab=tparam['ab'], verb=tparam['verb']
)
Compute numerically the model using different Fourier options#
htarg = {'dlf': hfilt}
tstandard = empymod.dipole(
**tparam, htarg=htarg, ftarg={'dlf': ffilt, 'pts_per_dec': 0})
tlaggedco = empymod.dipole(
**tparam, htarg=htarg, ftarg={'dlf': ffilt, 'pts_per_dec': -1})
tsplined4 = empymod.dipole(
**tparam, htarg=htarg, ftarg={'dlf': ffilt, 'pts_per_dec': 4})
tspline10 = empymod.dipole(
**tparam, htarg=htarg, ftarg={'dlf': ffilt, 'pts_per_dec': 10})
Results#
plt.figure(figsize=(10, 4))
plt.suptitle('Fourier transform example: impulse response; offset = ' +
str(xt/1000)+' km', y=1.05, fontsize=15)
plt.subplot(121)
plt.title('Amplitude (V/[m.s])')
plt.semilogy(t, np.abs(tresp), 'k', label='Analytical')
plt.semilogy(t, np.abs(tstandard), label='Standard')
plt.semilogy(t, np.abs(tlaggedco), label='Lagged')
plt.semilogy(t, np.abs(tsplined4), label='Splined 4/dec')
plt.semilogy(t, np.abs(tspline10), label='Splined 10/dec')
plt.xlabel('Time (s)')
plt.legend()
plt.subplot(122)
plt.title('Relative Error (-)')
plt.semilogy(t, np.abs((tstandard-tresp)/tresp), label='Standard')
plt.semilogy(t, np.abs((tlaggedco-tresp)/tresp), label='Lagged')
plt.semilogy(t, np.abs((tsplined4-tresp)/tresp), label='Splined 4/dec')
plt.semilogy(t, np.abs((tspline10-tresp)/tresp), label='Splined 10/dec')
plt.xlabel('Time (s)')
![Fourier transform example: impulse response; offset = 2.0 km, Amplitude (V/[m.s]), Relative Error (-)](../../_images/sphx_glr_dlf_standard_lagged_splined_006.png)
Runtimes and number of required frequencies for each method:
Fourier DLF Method |
Time (ms) |
# of frequencies |
|---|---|---|
Standard |
1442 |
8100 |
Lagged Convolution |
17 |
105 |
Splined 4/dec |
14 |
37 |
Splined 10/dec |
32 |
91 |
All methods require 201 wavenumbers (1 offset, filter length is 201).
So the lagged convolution has a relative error of roughly 1e-5, hence 0.001 %, which is more then enough for real-world applications.
If you want to measure the runtime on your machine set tparam['verb'] =
2.
empymod.Report()
Total running time of the script: (0 minutes 5.392 seconds)
Estimated memory usage: 330 MB